

TAG:VLA大模型

热钱狂涌下,谁在争夺机器人“灵魂”:身体已就位、大脑却断粮
2026年上半年国内具身智能赛道近440亿元热钱涌入,其中过半流向“大脑派”公司,机器人本体仅获不到20%份额。文章指出,运动控制已成熟,大脑(VLA、端侧芯片、世界模型)才是“灵魂”所在。数据缺口超99%,资本用脚投票,华为、腾讯等巨头加码布局,定义着通用自主机器人的未来壁垒。

时隔4年,小米新款人形机器人亮相
小米时隔四年发布新款人形机器人,展示“比心”、递物等精细交互,并已进入汽车工厂执行搬运与装配任务。文章重点解析其核心技术突破:VLA大模型Xiaomi-Robotics-0、触觉抓取微调、异步推理及“偷懒效应”治理,呈现小米从演示走向产业落地的路径。
亚毫米级精准对位:小米开源VLA大模型后训练全流程
小米正式开源视觉-语言-动作(VLA)大模型 Xiaomi-Robotics-0 的真机后训练全流程。该模型凭借仅20小时的任务数据训练,即可实现亚毫米级的精准对位,完成耳机收纳等复杂操作。此次全链条开源涵盖模型权重、技术报告及源代码,旨在降低具身智能开发门槛,加速高精度 AI 机器人在生产生活中的应用落地。

小米开源VLA大模型后训练全流程,推动机器人实现亚毫米级操作能力
小米公布并开源VLA大模型Xiaomi-Robotics-0真机后训练全流程,聚焦解决机器人落地“最后一公里”。机器人仅用20小时任务数据强化训练,即实现连续收纳耳机等亚毫米级精细操作,兼顾高精度对位与实时纠偏稳定性,降低高性能机器人任务开发门槛,推动复杂场景应用加速落地。

小米发布首代机器人 VLA 大模型,突破物理智能延迟瓶颈
小米开源首代机器人VLA大模型Xiaomi-Robotics-0,拥有47亿参数,采用创新的MoT混合架构,通过视觉语言大脑和动作执行小脑协同工作,有效解决了现有模型因推理延迟导致的动作迟缓问题。该模型在消费级显卡上实现实时推理,并在多项仿真测试中刷新SOTA成绩,展现出卓越的手眼协调和物理泛化能力。小米全面开放技术资源,推动具身智能领域发展。

小米发布首代机器人VLA大模型并开源
小米宣布开源其首代机器人VLA大模型Xiaomi-Robotics-0,这是一个拥有47亿参数、结合视觉语言理解与高性能实时执行能力的开源模型。它采用MoT混合架构和异步推理模式,有效解决了机器人动作延迟和断层问题,在仿真测试和真实任务中均取得领先性能,实现了动作连贯、反应灵敏的物理智能。

小鹏第二代VLA大模型一季度上车 开启具身智能量产潮
小鹏汽车在2026全球新品发布会上宣布将物理AI与全球化作为核心战略,推出第二代VLA大模型,该模型具备从视觉感知到动作指令的端到端驱动能力,被视为行业首个初阶L4物理模型,将于2026年第一季度在Ultra车型上量产。同时,小鹏计划启动Robotaxi运营,并实现人形机器人及飞行汽车的规模化交付,加速向全球化具身智能公司转型。
中国原创全球首款具身机器人通用基座问世 重塑智能研发范式
TRON 2作为全球首款具身机器人通用基座,通过模块化设计实现一机三态,为VLA大模型落地提供硬件支持。它解决了硬件平台分散、算法与执行脱节、环境适应性差等行业核心挑战,重塑了具身智能研发范式。

北京推出国内首个符合国标的VLA大模型机器人XR-1
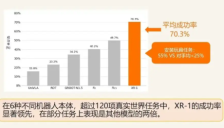
北京人形机器人创新中心开源了国内首个符合具身智能国家标准的VLA大模型XR-1,标志着中国在智能机器人领域的重要突破。该模型具备跨平台运行能力,能精准执行复杂操作,并配套提供RoboMIND2.0数据底座和ArtVIP数据集,为开发者与研究人员提供了强大的技术支持与资源。

北京人形机器人开源VLA大模型XR-1 助力高效作业
北京人形机器人创新中心开源了其核心的具身智能跨本体视觉语言动作(VLA)大模型XR-1,旨在系统性解决机器人如何‘能干活、会干活’的核心难题。XR-1模型在权威测评中表现出色,具备跨场景、跨本体的多任务执行能力,并配合大规模数据集RoboMIND V2.0,为机器人实用化提供了完整的技术方案,推动具身智能向‘全自主、更好用’的目标迈进。

国内首个国标VLA大模型开源 北京人形机器人XR-1实现智能干活
北京人形机器人创新中心开源国内首个通过国标测试的具身VLA大模型XR-1,配套RoboMIND2.0数据底座和ArtVIP数据集。该模型具备跨本体运行能力,能精准执行复杂操作,推动人形机器人从实验室走向真实场景应用,降低行业开发门槛。

从“信任机器”到“信任逻辑”:长城VLA大模型如何为安全感“编程”?
长城汽车在广州车展发布VLA大模型与CP Master辅助驾驶系统,具备听得懂指令、识别隐形危险、逻辑推理和可信赖四大核心能力。该系统采用4D毫米波雷达+激光雷达融合感知,暗光识别距离达250米,支持15步逻辑链完成复杂驾驶任务。首搭魏牌新能源车型,预计2026年Q2交付,官方宣称高速NOA千公里接管次数低于0.3次,显著优于行业平均水平。







