

TAG:触觉感知

国内首款量产3D磁触觉灵巧手问世 触觉感知精度达蝴蝶落手级别
在2026张江具身智能供应链大会上,傲意科技发布了国内首款量产3D磁触觉灵巧手ROH-AP003,其传感器能感知0.1N的力,相当于蝴蝶落手的重量,提升了机器人操作的精度和适应性。文章聚焦于这款灵巧手的技术突破、量产能力及产业意义,探讨了触觉感知在具身智能从实验室走向真实场景中的关键作用,并分析了傲意科技在全栈自研、成本控制和规模化落地方面的实践,为机器人产业发展提供了新样本。

千觉超越传感器,布局具身智能触觉基础
本文探讨了具身智能中视觉系统的局限性,强调触觉感知是机器人实现精细物理交互的核心。千觉机器人在ICRA 2026上展示了全栈触觉智能体系,包括硬件、数据和模型,通过VTLA模型驱动的双臂操作演示,证明了在干扰环境下完成复杂任务的能力。这为具身智能时代提供了关键的‘触觉底座’,推动机器人从被动执行向主动感知升级。

戴盟以触觉感知赋予机器人物理直觉,获汇川产投、中国电信亿元融资
戴盟机器人近日完成亿元A轮融资,由汇川产投和中国电信联合投资。公司专注于触觉感知技术,通过构建大规模物理交互数据集和物理世界模型,赋予机器人物理直觉能力,以推动具身智能在工业等场景的规模化落地。此次融资将加速其Physical AI底层基础设施建设,实现数据飞轮和商业闭环,引领行业向真实物理操作跃迁。

戴盟机器人完成亿元A轮融资,汇川产投、中国电信联合投资
戴盟机器人完成亿元A轮融资,由汇川产投和中国电信联合投资,资金将用于构建大规模物理交互数据集,推动物理世界模型研发,实现数据闭环。公司专注于物理AI和具身智能,通过触觉感知技术让机器人理解真实世界,此次融资彰显产业巨头对其技术路径和商业化前景的认可,将加速在工业自动化和智能机器人领域的落地。
Figure 03机器人分拣直播引发讨论:2026年人形机器人必须长出真皮肤。
本文以Figure 03人形机器人分拣快递的直播为引,深入探讨2026年电子皮肤成为人形机器人标配的必要性。电子皮肤作为柔性触觉感知系统,解决了机器人缺乏触觉的痛点,使其能精准感知物体软硬、轻柔操作,推动机器人从表演转向实际生产力。文章介绍了技术突破、国产企业落地案例,并展望电子皮肤将如何改写产业格局,赋能物流、医疗、家庭等多场景应用。
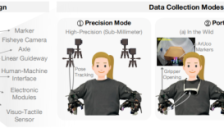
港大与复旦联手推出TAMEn实现亚毫米触觉操控与100%复现解决双手机器人数据采集难题
香港大学与复旦大学等机构联合推出TAMEn触觉感知操纵引擎,针对双手机器人在柔性物体抓取、精密装配等高接触任务中的数据采集难题。TAMEn通过视觉-触觉闭环系统,实现亚毫米级精度和100%数据复现率,支持双模式硬件切换和在线可行性校验,有效解决了精度与便携性矛盾、硬件适配难、数据清洗耗时等问题,为机器人策略学习提供高质量数据。


具身模型Scaling Law初现迹象:人形机器人数据竞争全面打响
文章聚焦具身智能从“本体”转向“具身大脑”后,数据成为新一轮核心变量的行业趋势。梳理数据采集中心、开源数据集、分布式众包网络与数据商业化探索,并以戴盟Daimon-Infinity触觉多模态数据集为例,说明触觉数据可降低训练数据依赖、提升精细操作成功率,具身模型Scaling Law或初步显现。
2026最新具身智能触觉综述
本文是对2026最新具身智能触觉领域重磅综述的核心内容拆解,由多所高校联合团队牵头撰写,梳理了截至2026年第一季度的前沿研究,解析触觉感知的核心价值、多模态触觉融合四阶段流程,还介绍了层次化分类体系与相关数据集发展脉络,为领域研究者提供全面参考。

AI仿生皮肤突破水下探测 机器人实现激流触觉感知
本文介绍浙大与新国大联合研发的AI仿生水下电子皮肤。受鲨鱼侧线启发,该皮肤结合仿生鳞片物理降噪与深度学习算法,能在湍流、高压及零能见度环境中精准识别微细纹理。该技术突破传统声呐与视觉局限,赋予水下机器人高精度触觉感知,为深海探测提供全新解决方案。

王兴兴:人形机器人动作自由是具身智能关键
宇树科技创始人王兴兴在西门子RXD大会上宣布,六个月内将实现人形机器人任意动作生成与自主出招对打,标志着具身智能从预设动作迈向自主运动智能的关键突破。文章探讨了动作自由对机器人智能化的重要性,以及触觉感知、抓取技术等落地难题,展望了具身智能的商业化前景。

小米推出仿生手:体积减六成 新增汗腺散热
小米机器人发布全新全掌触觉仿生手,体积压缩60%,引入仿生汗腺散热技术,实现64%自由度提升与8200平方毫米触觉覆盖。通过15万次耐久测试,推动具身智能向柔性制造产线落地迈进。

机器人突破触觉感知 全球最大训练中心启用
国产人形机器人迎来重大突破!北京石景山建成全球最大机器人数据训练中心,首次实现0.01牛级触觉感知,精准捕捉如头发丝轻触般的压力。该中心推动机器人从视觉主导迈向多模态感知融合,显著提升在精密操作、医疗康养等场景的应用能力,标志着我国机器人产业从‘硬件制造’向‘智能感知’跃迁的关键一步。

全国最大人形机器人训练基地启用 可感知头发丝压力
北京石景山区投用全国最大人形机器人训练基地,重点培养机器人触觉感知能力,可识别0.01牛的力度,相当于头发丝的压力。这一突破将提升机器人在精细操作和多模态感知领域的能力。
VT-WM突破视觉局限 机器人更懂物理接触
本文介绍了VT-WM(视觉-触觉世界模型)如何突破纯视觉世界模型的局限,通过融合视觉与触觉感知,让机器人能够更准确地理解和预测物理接触任务。该模型解决了在抓取、堆叠等高接触操作中常见的物体消失、幻觉等问题,显著提升了任务规划成功率,为机器人交互提供了更可靠的多模态解决方案。

香港中文大学任洪亮团队创新人工动觉框架 走出视觉依赖桎梏
香港中文大学任洪亮团队在《Nature Reviews Bioengineering》发表评论文章,提出人工动觉分层框架,旨在解决当前手术机器人过度依赖视觉的局限。该框架通过物理感知、算法解读和协同控制三个层次,让机器人能够感知器械受力、组织硬度等物理互动,实现类似人类外科医生的多感官协同能力,为下一代智能手术机器人的自主性和适应性奠定基础。







