

TAG:机器人操作
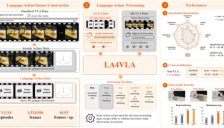
让机器人先学动作语言:LA4VLA 重新拆解 VLA 预训练
本文深入探讨了标准VLA模型中语言指令容易被视觉信息主导的问题,并通过实验展示模型在冲突情境下更依赖视觉而非语言。文章介绍了LA4VLA方法,它通过先进行无视觉的语言-动作预训练,让模型学习语言与动作的基本对应规律,再结合视觉进行完整策略学习,从而提升机器人对语言指令的真正理解与执行能力。

SOTA刷新:具身模型ACE-Ego正式开源,解析机器人如何看懂人类动作
大晓机器人联合港中文发布并开源具身操作VLA模型ACE-Ego,在RoboCasa与RoboTwin两大基准刷新SOTA。文章解析其通过第一视角人类视频与机器人数据联合预训练的关键方案,以及在零售打包、装盒等复杂场景中的落地表现与泛化价值。

千觉超越传感器,布局具身智能触觉基础
本文探讨了具身智能中视觉系统的局限性,强调触觉感知是机器人实现精细物理交互的核心。千觉机器人在ICRA 2026上展示了全栈触觉智能体系,包括硬件、数据和模型,通过VTLA模型驱动的双臂操作演示,证明了在干扰环境下完成复杂任务的能力。这为具身智能时代提供了关键的‘触觉底座’,推动机器人从被动执行向主动感知升级。

王启斌:当机器学会动手,具身智能的胜负手不在整机
本文深度探讨了灵初智能创始人王启斌对具身智能的独特见解,强调操作能力而非整机形态是未来竞争的关键。文章指出,通过轮式双臂结构和人类数据驱动的强化学习,灵初智能致力于突破灵巧操作的商业化落地难题,推动具身智能从移动向操作跨越,为行业提供了创新的技术路线和商业思考。
南科大、港大与星尘智能合作:FFDC让机器人学会“何时相信想象”,自适应世界模型执行框架推动具身智能发展
本文介绍了南方科技大学、香港大学和星尘智能合作的研究,提出了FFDC-WAM框架,通过未来-现实验证机制让机器人自适应调整动作执行。该框架利用FFDC验证器动态评估预测动作的可信度,从而在保持长时序执行效率的同时,增强对现实偏差的响应能力。实验表明,在RoboTwin基准和真实场景中,FFDC-WAM显著提升了机器人的鲁棒性和效率。

EPFL团队提出以面代爪操作新范式,让机器人摆脱抓取执念
EPFL团队提出「以面代爪」的机器人操作新范式,使用可重构的平面模块代替传统夹爪,通过平移、翻转和旋转等操作原语来操控物体。这种方法避免了抓取带来的局限,能稳定处理从刚体到软体的各种物体,如草莓、生鱼和橡皮泥,为食品包装、生鲜分拣等领域提供了高效自动化解决方案。
具身大模型R1时刻:LIBERO终结者实现99.9%物理推理新范式
本文介绍了具身大模型的新突破LaST-R1,它通过隐空间物理推理和强化学习优化,使机器人在行动前进行物理思考,而非简单模仿。在LIBERO benchmark上达到99.9%成功率,真机任务中比现有最强模型π0.5高出22.5%,显著提升了泛化能力。这一范式解决了传统模型在环境变化时失效的问题,为机器人操作提供了更稳定的物理推理基础。

IEEE专访王煜:戴盟致力于让机器人拥有“手感”
IEEE专访戴盟机器人联合创始人王煜,聚焦公司发布的全球最大含触觉全模态具身数据集Daimon-Infinity。王煜分享触觉在机器人灵巧操作中的核心作用,数据集开源10000小时数据以推动具身智能落地,解决物理交互数据瓶颈。文章强调触觉反馈的重要性,并介绍戴盟的触觉传感技术和VTLA架构。
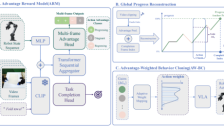
具身智能公司提出新方法,解决困扰机器人长程任务多年的“奖励瓶颈”问题
文章聚焦机器人长程任务中的“奖励瓶颈”,介绍逐际动力联合高校提出的ARM框架:以“前进/后退/停滞”三态相对优势替代绝对进度估计,并结合MIMO时序Transformer、自动化进度重建与AW-BC训练策略,显著提升长视界操作学习效率与稳定性,在双手毛巾折叠任务中实现99.4%成功率。

高阳团队发布重磅成果 Point-VLA用单个视觉框攻克具身智能核心难题
本文介绍千寻智能高阳团队推出的Point-VLA具身智能方案,通过在指令中加入视觉框锚定目标,无需改动现有模型架构和海量标注,即可解决纯文本指令指代歧义、泛化不足的痛点,真实场景操作平均成功率达92.5%,还同步提升了纯文本模式下的模型性能。
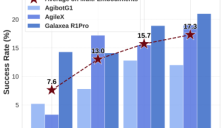
蚂蚁灵波开源具身大模型LingBot-VLA,后训练代码全面开放,让开源真正可用
蚂蚁集团旗下灵波科技开源具身大模型LingBot-VLA,作为面向真实机器人操作的智能基座,实现了跨本体、跨任务泛化能力,大幅降低后训练成本。在GM-100和RoboTwin2.0评测中刷新成功率纪录,仅需80条演示数据即可高质量迁移任务,推动具身智能规模化落地。

国地中心发布全球首个跨本体视触觉数据集,助力具身智能发展
国地中心与纬钛机器人联合发布全球首个跨本体视触觉多模态数据集——白虎-VTouch,规模超6万分钟,涵盖轮臂机器人、双足机器人等多种本体构型。该数据集针对具身智能机器人面临的真实交互数据稀缺、触觉信息不足等核心难题,提供矩阵式任务构建与多模态采集方案,为下一代具身VTLA模型提供关键数据基础与工程底座,加速机器人从感知到精细操控的落地进程。
五校联手推出DeSa2VA框架,攻克多模态分割难题
五校联合团队推出的DeSa2VA框架解决了多模态分割中的模态鸿沟问题。文章重点介绍了HO-Cap解决方案,它通过低成本RGB-D相机和AR头显,结合半自动化AI标注流程,高效生成高精度手-物交互3D数据。配套开源的HO-Cap数据集包含65.6万帧数据,覆盖多种日常物体和交互场景,大幅降低了相关研究门槛,并可直接用于机器人操作、VR/AR等领域的训练与测试。
IROS2025:大语言模型结合行为树,机器人自适应操作新突破
本文介绍了一种结合大语言模型与行为树的人机交互学习机制,用于实现自适应机器人操作。该方法通过上下文学习和人机交互引导,生成可直接应用于机器人的动作知识,有效减少了LLM调用次数并提升了任务成功率。实验表明,该方法在多种任务中表现出良好的适应性和泛化能力,能够应对外部干扰并处理新任务。
UT Dallas与Nvidia开源HO-Cap方案 含65万帧高质量数据
UT Dallas与Nvidia联合推出HO-Cap方案,通过低成本RGB-D相机和AR头显,结合半自动化AI标注流水线,实现了高精度手-物交互数据采集。配套开源数据集包含65.6万帧RGB-D图像,覆盖64个日常物体和多种交互场景,大幅降低人机交互、VR/AR和机器人操作研究门槛。







