

TAG:机器人协同

机器人全身协同控制系统实现精细操作
文章介绍了Current Robotics发布的全身灵巧操作模型Curr-0,该模型通过单一策略统一控制机器人的移动、全身姿态协调和手部精细操作,实现实时协同完成精细任务。基于HumanEx系统采集的真实人类数据训练,Curr-0解决了传统机器人移动与操作分离的局限,为具身智能发展提供全栈基础。未来将构建世界模型,实现数据到部署的闭环迭代。

从单机智能到群体智能 智源具身大脑赋能跨本体多机协同机器人餐吧
本文探讨了具身智能行业从单机智能向群体智能发展的技术突破,重点介绍了智源研究院的RoboBrain 2.0和RoboOS 2.0平台如何解决异构机器人协同难题。文章通过中关村论坛上的机器人餐吧案例,展示了跨本体多机协同技术在餐饮服务场景的成功应用,为具身智能的商业化落地提供了示范。

科学家组建AI团队 加速新材料研发
中国科学院深圳先进技术研究院成功研制出“多AI—多机器人”协同智能体系统(MARS),该系统通过模拟人类研发团队分工,整合19个专业智能体与16种领域工具,实现了从任务规划到数据分析的全流程自主材料探索。在实验中,MARS将微胶囊等新材料的研发时间从4个月大幅缩短至4小时,展现了高效的人机协同科研新范式,为加速新材料创制提供了智能化解决方案。



数聚链融合AI与机器人技术 加速迈向新质生产力
本文介绍了杭州数聚链科技有限公司如何通过其“AI+机器人”战略,以“机器人全域协同大脑”为核心,构建一个能够指挥百台异构机器人协同作战的操作系统。文章详细阐述了多形态机器人集群(轮式/履带、四足/双足、无人机)的协同应用,以及该操作系统在全域感知、智能决策和协同调度方面的核心技术优势,旨在突破传统机器人规模化应用的局限,推动新质生产力的发展。
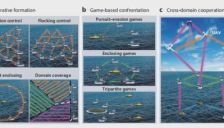
数据驱动技术重塑海洋机器人控制:港科大与大连海事大学团队发布权威综述
本文系统介绍了数据驱动方法如何革新海洋机器人控制领域。文章基于港科大与大连海事大学团队在顶刊发表的权威综述,分析了传统控制方法在复杂海洋环境中面临的非线性、模型不确定性等瓶颈,并重点阐述了基于机器学习的数据驱动控制技术如何帮助海洋机器人实现自适应、高鲁棒性的智能升级,涵盖AUV、ROV、USV等多种平台及协同控制应用。







