

TAG:多模态运动
北理工团队研发磁驱微机器人 实现形态功能共融决策
北京理工大学王化平团队受生物支点行走启发,提出磁驱微机器人“形态-功能”共融的自主决策新机制,实现复杂环境中多模态运动切换与精准抓取。该研究发表于《IEEE Transactions on Robotics》,通过分层控制架构和非均质磁化设计,使微机器人在变径隧道、沟壑跨越及多形状目标运输中表现出高适应性与路径精度,推动微机器人向智能化、自主化迈进。
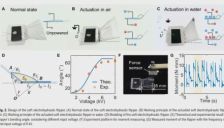
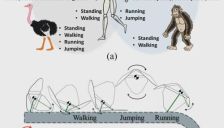
上交大团队研发软体电液鳍驱动两栖机器人:三种运动模态自如切换!
上海交通大学研究团队成功研发出一款多模态两栖软体机器人,采用创新的软电液鳍驱动技术,能够在陆地爬行、水中游泳等多种运动模式间自如切换。该机器人具备出色的环境适应性,可在2.1°C至61.3°C的极端温度环境下正常工作,无需任何结构改造,为未来两栖探索机器人提供了新的技术方案。





美股三大指数震荡整理,芯片股走高,光通信板块大涨
2026-05-11
0 浏览
多空胶着恒指震荡整理,AI景气外溢主导行情波动
2026-05-11
0 浏览
宠物AI公司PurrPurr获阿尔法公社投资 首年GMV目标5000万
2026-05-11
0 浏览
隆源股份业绩说明会回应今年新能源汽车零部件领域新客户洽谈中
2026-05-11
0 浏览
中国品牌市占率达75%,4月我国汽车销量约252.6万辆,新能源汽车出口贡献度近五成
2026-05-11
0 浏览
4月汽车出口增长51% 国内零售下跌超20%
2026-05-11
0 浏览
4月全国新能源汽车渗透率历史首次突破60%,燃油车零售同比暴跌37%
2026-05-11
0 浏览
港股复盘:强势翻红 芯片概念股冲高回落 短期风险需警惕
2026-05-11
0 浏览
申昊科技拟设具身智能子公司 加码人形机器人业务
2026-05-11
0 浏览


